Continuous precise user tracking.
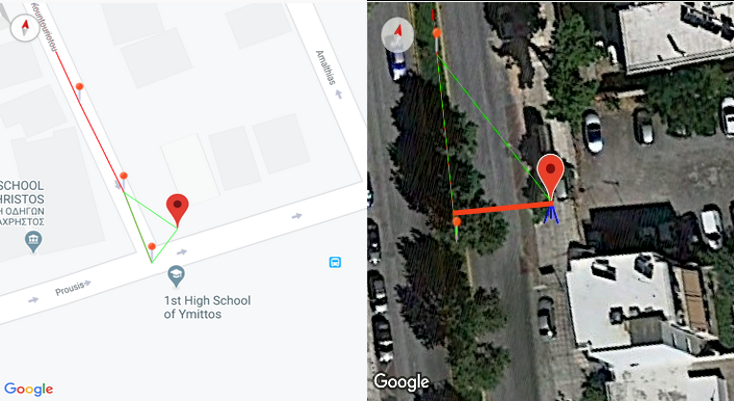
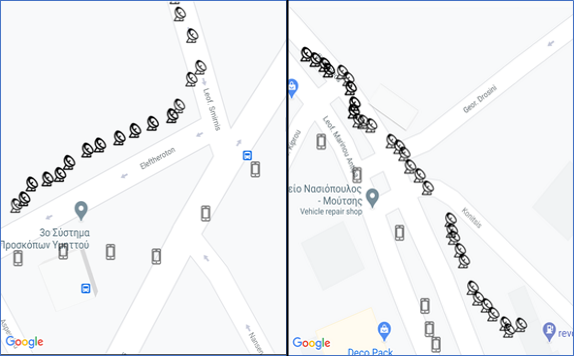
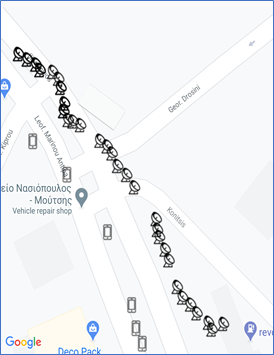
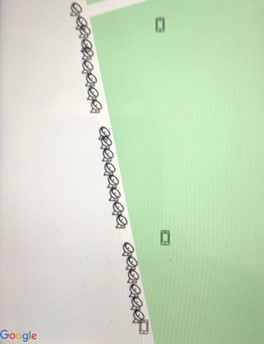
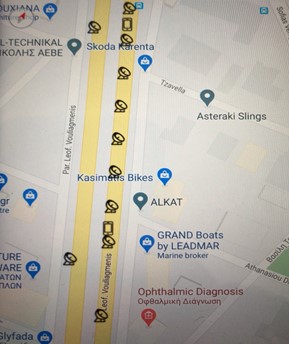
The outdoor blind navigation application integrates an external high precision GPS transceiver, which allows a sub-meter error in positioning accuracy and very dense position reporting. This is a great advantage of our application, as, besides the inappropriate instructions, the integrated GPS tranceiver+antenna on a smartphone is not appropriate for blind navigation. The particular research contribution has gained reputation among the international blind navigation community and is cited in major scientific area reviews, having received the best innovation award when presented in an ACM international conference on assistive environments. The typical smartphone GPS positioning error is in the 10m range. In our trials, we have recorded even larger errors. Furthermore, phone GPS position reporting is much less frequent. You may see the comparison in the above figures, in which the smartphone icon refers to the smartphone GPS reported positions, whereas the satellite antenna depicts the real blind person positions and route reported by the blind navigation application using the external GPS receiver (6 vs 18/30 and 3 vs 23 points). Several phone GPS reported positions are determined much more than 10 meters away from the real positions. The figure on the right depicts the reported positions when the user is inside a bus moving at a typical bus speed (2 vs 9 reported positions). The opposite way depicts a couple of reported positions when moving at a very high speed, in which case no position has been reported by the phone GPS.
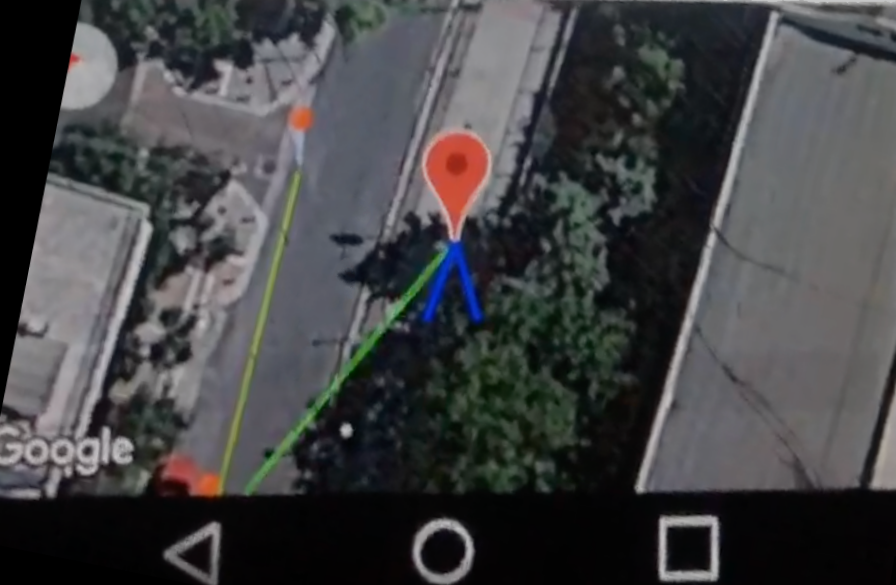
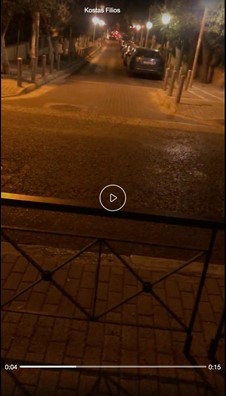
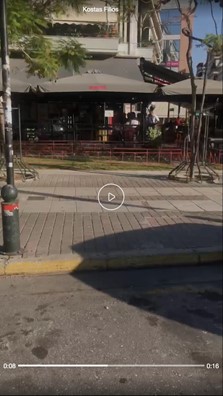
Indicative trials depicting the high precision of the reported positions of the outdoor blind navigation application using the external GPS receiver. The illustrated street pictures were taken at the pin positions of the corresponding Google map (satellite view) images reported by the external GPS receiver. Evidently, the street picture and the corresponding Google maps image are a perfect match. In the night picture, the reported position lies in the wide pavement behind the railings, parallel to the navigation route path, at the middle point of the intersection with the perpendicular street. In the day picture, the picture was taken standing on the street opposite to the three shadow awnings at the outdoor place of the Everest restaurant. The top of the awnings are visible in the Google maps satellite view images, i.e. the three gray rectangles enclosing an indistinct X formed by the pyramid-like faces of the awnings.
External wireless microelectronic device of the outdoor blind navigation application. Device versions 1 and 2 are illustrated. The older device is built around the Atmega 2560 microcontroller and the U-blox NEO-6M GPS receiver. The new version is built around the Atmega 328p uC and the U-blox NEO-8M GPS module, demonstrating a reduced size, cost and power consumption, optimized memory management and battery level monitoring.

")