
")









MANTO project waterproof traffic light field sensor (top box) deployed at the intersection of Athinas and Doiranis streets, in Kallithea, close to the premises of the Lighthouse for the Blind of Greece.
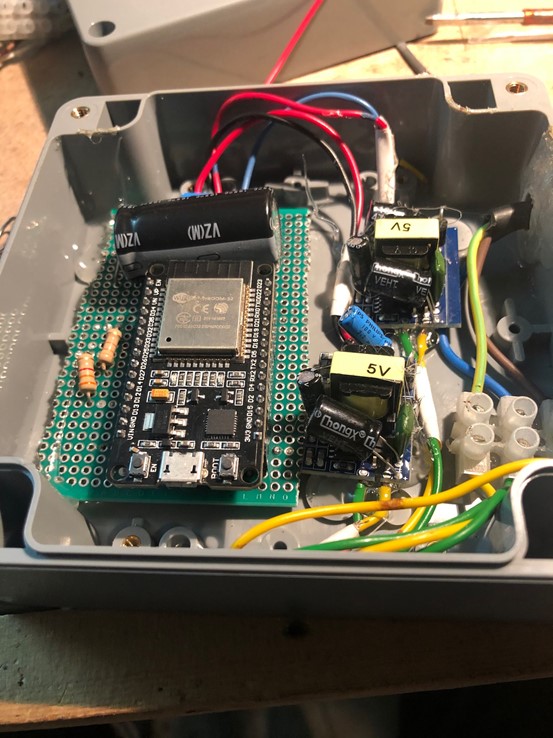
Microelectronic circuit inside the housing of the traffic light field sensor.
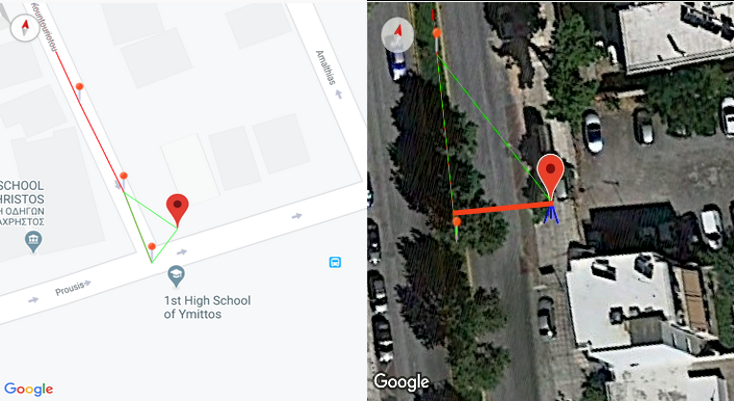
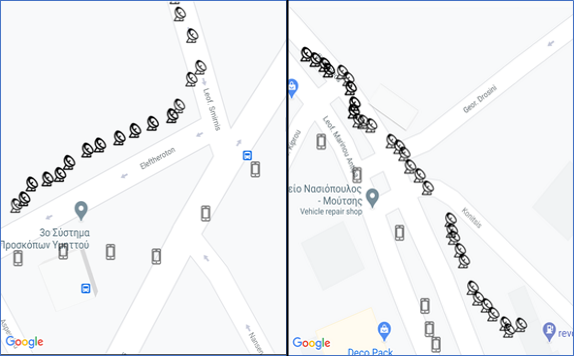
In the adjacent figure, we illustrate an intersection crossing case and at the same time high accuracy and density in finding the blind user location, which allows the precise guidance given by the application to the BVI to cross the intersection with the traffic light. The particular intersection traffic light integrates the own developed specialized field sensor which allows the real time sensing of the traffic light status and other field information by the smartphone blind navigation application. The user positions reported by the external GPS module and by the phone GPS are represented by the antenna and mobile phone icons, respectively. The real path is the line (row) of antennas. As can be seen from the picture, the user moves in the line formed by the antennas, while the built-in receiver of the mobile device shows him on the left, in a parallel path. You may see the precise positioning and density of reported precise positions along the BVI route (density is typically 5-8 times higher). The positioning error (misplaced positions) of the embedded receiver of the mobile device is evident, as illustrated by the less frequent points with the mobile phone shown in the image, in contrast to the many points that are represented with the satellite dish which are the reported points of the external receiver. The average value of the deviation of the GPS of the mobile phone and the external receiver is approximately 10m. Additionally, at the point of interest concerning the traffic light and the intersection crossing, the deviation reaches 12m. In fact, the reported position of the smartphone GPS points to the adjacent intersection. Approaching the traffic light in the final 10m (or less) according to the scale, we have reference points mentioned every 2-3 meters, incorrectly reported position from the receiver of the mobile device greater than 10 m and reported positions from the receiver of the mobile phone at intervals greater than 10 m. The latter show that our implementation has good guidance accuracy in relation to the position, the traffic light status and the available crossing time.
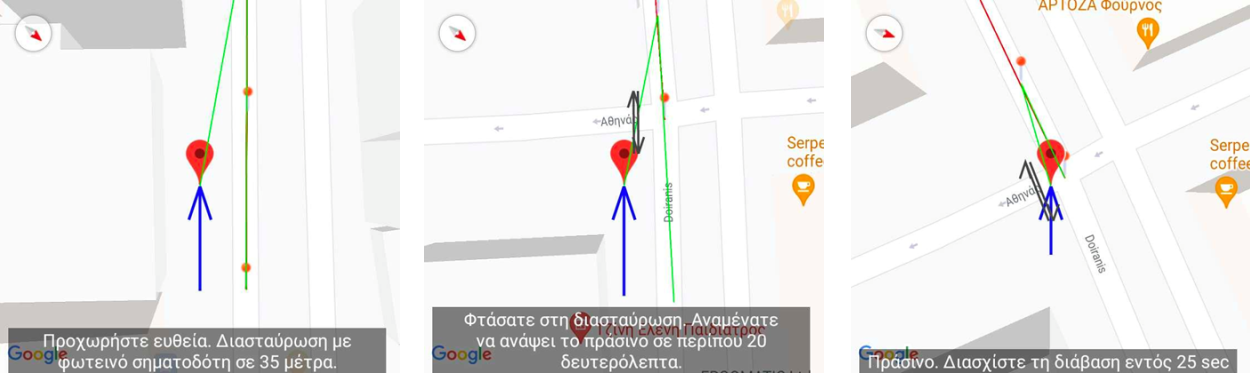
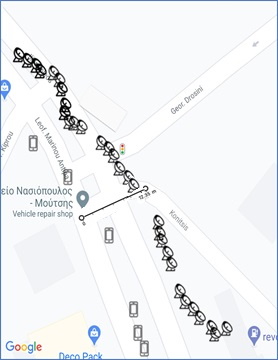
The previous pictures present a usage scenario for the operation of the navigation application regarding traffic lights. The blind user is located at the pin point and is moving along the path indicated with the blue arrow.
Leftmost picture: “Go straight ahead. Intersection with a traffic light at 35 meters.”
Middle picture: “Υou have reached the crossroads. Green will light up in about 20 seconds.”
Rightmost picture: “Green. Cross the passage within 25 sec.”