
")








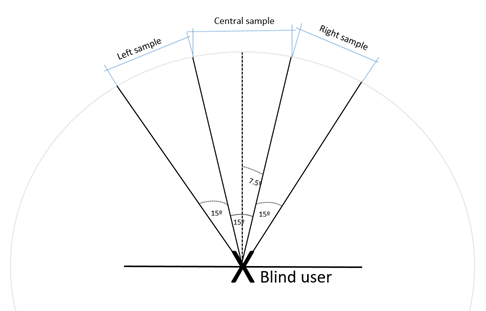
Εικόνα 1: Αρχή λειτουργίας συστήματος servo-sonar.
Συνεχής κεντρική, αριστερή και δεξιά ανίχνευση με επαναληπτική περιστροφή με σερβομηχανισμό του αισθητήρα υπερήχων 15 μοίρες αριστερά και δεξιά από την κεντρική θέση, που δημιουργεί μία γωνία θέασης 45 μοιρών κατά μήκος της πορείας του τυφλού.
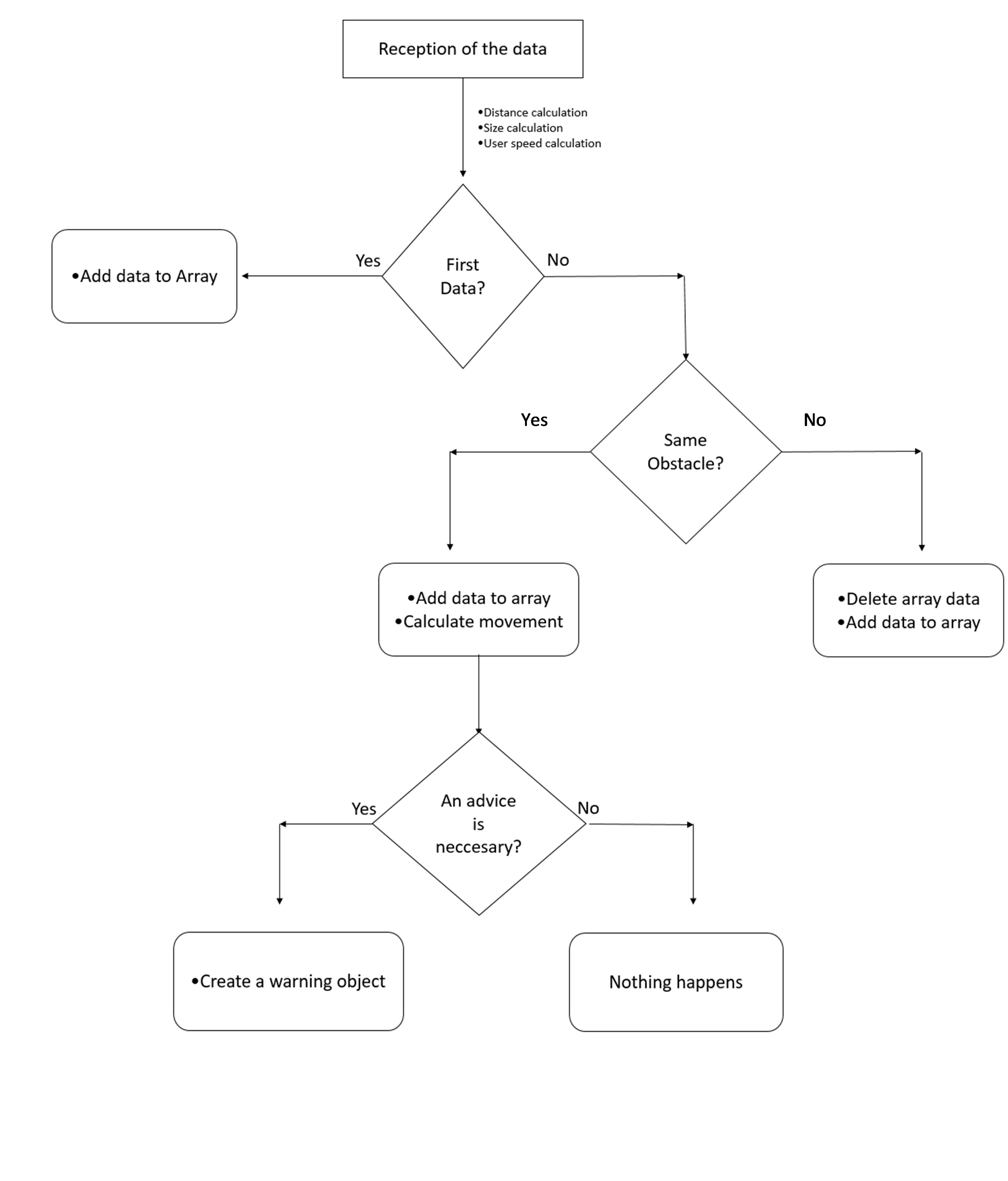
Εικόνα 2: Διάγραμμα ροής του αλγορίθμου ανίχνευσης εμποδίων που έχει προταθεί από το έργο.
Τα δεδομένα ανίχνευσης του αισθητήρα υπερηχητικού εντοπισμού λαμβάνονται συνεχώς από την εφαρμογή πλοήγησης και χρησιμοποιούνται για τον υπολογισμό της απόστασης του χρήστη από το εμπόδιο, της ταχύτητας του χρήστη και του πλάτους του εμποδίου προκειμένου ο χρήστης να ενημερωθεί φωνητικά για την αποφυγή του.
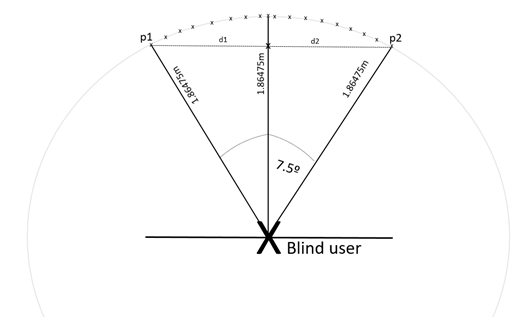
Εικόνα 3: Επεξήγηση της διαδικασίας αναγνώρισης εμποδίου στην απλή περίπτωση που στα πλευρικά δείγματα δεν εντοπίζεται κάποιο εμπόδιο.
Η ακριβής θέση του εμποδίου έμπροσθεν σε απόσταση 1.86475m δεν είναι γνωστή, καθώς ο αισθητήρας υπερήχων εντοπίζει ένα εμπόδιο εντός της γωνίας θέασης 15 μοιρών, δηλαδή εντός του τόξου p1p2. Σημειακά εντός του τόξου p1p2 υπάρχουν άπειρες θέσεις με ίδια απόσταση από τον αισθητήρα στις οποίες μπορεί να εντοπίζεται το εμπόδιο. Με απλούς γεωμετρικούς υπολογισμούς, ο αλγόριθμος θεωρεί ότι το εμπόδιο έχει πλάτος 0.48679m, καθώς στις πλευρικές γωνίες θέασης 15 μοιρών δεν εντοπίζεται εμπόδιο σε αυτή την απόσταση, ενημερώνοντας κατάλληλα τον τυφλό χρήστη για την αποφυγή του.
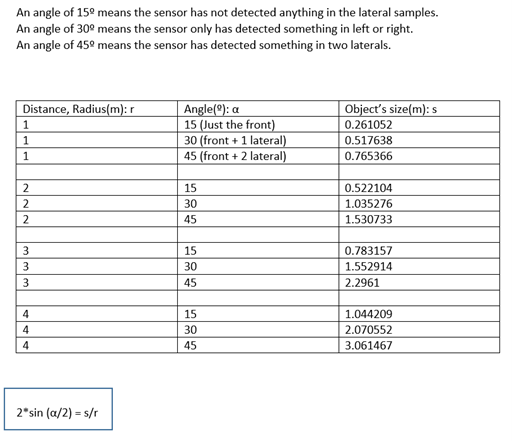
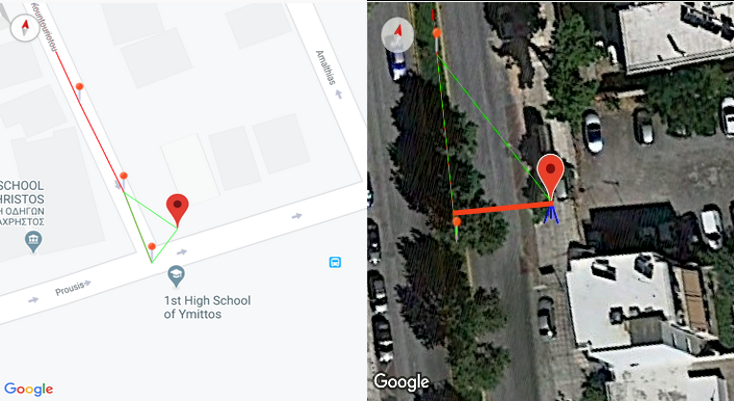
Εικόνα 4: Ενδεικτικά παραδείγματα αναγνωριζόμενων εμποδίων για διαφορετικές αποστάσεις και γωνίες εντοπισμού.

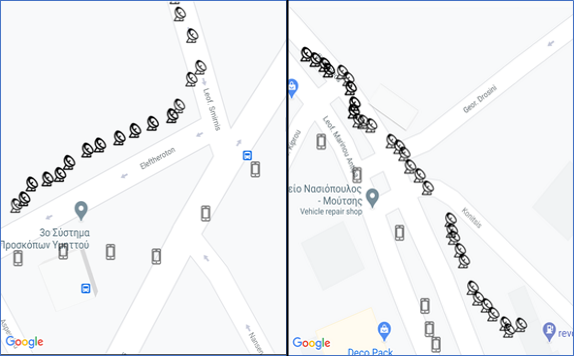
Εικόνα 5: Παραδείγματα εμποδίων μικρού και μεσαίου (L-R) πλάτους.

Εικόνα 6: Παραδείγματα εμποδίων μεγάλου πλάτους.

Εικόνα 7: Παραδείγματα μη ανιχνεύσιμων εμποδίων.